建筑施工现场具有人员设备混行、工序动态变化、风险源分散等特点。塔吊视角、楼层远距离监控、夜间施工和机械作业区等场景中,人员、安全帽、反光背心、安全锥等目标往往像素占比低、边缘纹理弱,容易出现漏检、误检和定位不稳定。传统视频监控与普通目标检测系统大多停留在“看见违规”或“红框报警”层面,难以进一步回答“隐患发生在哪里、风险等级如何、谁来整改、是否复核关闭”等管理问题。围绕这一行业痛点,南昌大学哲鼎科技团队研发了“智安量巡——基于BIAPENet小目标识别与施工坐标融合的智慧工地安全隐患闭环巡检系统”,尝试把视觉识别结果转化为可定位、可理解、可派发、可复核、可追溯的安全隐患事件。
“智安量巡”的核心目标,不只是让摄像头“看见”施工现场,更是让系统能够“理解”现场风险并推动处置闭环。项目围绕远距小目标识别稳定性、风险空间定位精细化、现场告警可理解性和隐患处置闭环化四个关键环节,构建了从数据输入、模型检测、边缘推理、区域定位、语义告警到事件治理的完整链路。
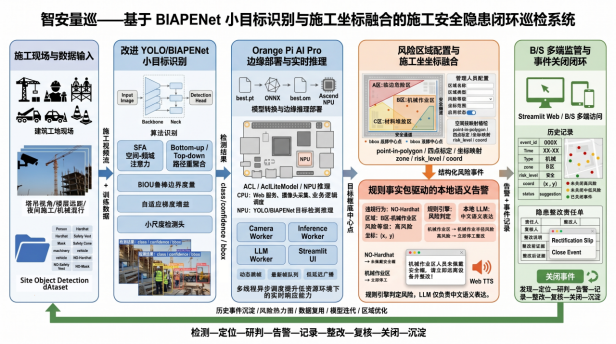
(图1 “智安量巡”智慧工地安全隐患闭环巡检系统总体流程示意图)
从系统流程看,施工现场视频流、摄像头画面和工地目标检测数据首先进入小目标识别模型;模型输出目标类别、置信度和边界框后,边缘端完成实时推理与规则判定;随后,系统将检测结果映射到临边区、机械作业区、材料堆放区、禁入区等施工风险区域,并生成结构化事件。项目以SODA工地目标检测数据集为核心验证场景,覆盖工人、安全帽、反光背心、脚手架、手推车、吊钩、围栏等15类施工安全相关目标,可同时表达人员、防护装备、材料构件、机械设备和现场布置等施工语义。最终,事件在B/S多端监管界面中完成记录、派发、整改、复核和关闭,形成“检测—定位—研判—告警—记录—整改—复核—关闭”的闭环。
一、从远距小目标入手,提升复杂工地视觉识别稳定性
真实工地环境中的安全识别并不是简单的“安全帽检测”。在塔吊高点、楼层远距、粉尘遮挡、暖色灯光和机械混行条件下,人员、防护装备、脚手架、手推车、钢筋材料等目标常常只占据画面中的少量像素;一旦边界框发生轻微偏移,检测结果就可能出现较大波动。针对这一问题,项目在YOLO框架基础上提出BIAPENet小目标增强检测思路,从特征表达、特征融合、边界框度量、梯度优化和检测头设计等方面进行系统改进。
实验结果显示,改进模型在小目标mAP50-95上提升16.22%,在高空巡检场景mAP50-95上提升16.47%,为塔吊、高点监控和无人机巡检等应用提供了更稳健的视觉基础。
二、把检测结果落到施工坐标,回答“隐患在哪里”
如果系统只能识别出“有人未戴安全帽”,仍然无法满足现场管理需求。施工安全监管更关心的是:这个人是否处于机械作业半径内,是否靠近临边洞口,是否进入禁入区域,风险应当如何分级,后续处置应由谁负责。为此,“智安量巡”将目标检测结果与风险区域配置、人员落点、四点标定和施工平面坐标融合起来,把单帧检测结果进一步转化为具有施工空间语义的风险事件。
在系统中,管理员可通过Web端配置临边危险区、机械作业区、材料堆放区、禁入区和安全通道等区域,每个区域包含区域名称、区域类型、默认风险等级、启用状态和多边形坐标范围。实时检测时,系统取人员或违规目标检测框的底部中心点作为落点,通过point-in-polygon判断目标是否进入对应风险区域,并结合PPE状态、人员短时追踪结果和安全规则生成风险事实包。
这种设计使系统从“检测到一个目标”升级为“判断某个目标在某个施工区域触发了某类风险”。通过四点标定与自定义定位底图,视频画面坐标还可以映射到施工平面坐标,事件不仅能显示在实时监控画面中,也能叠加到施工平面图或现场底图上,为隐患定位、责任派发、事件追溯和后续风险热力分析提供依据。
三、边缘端部署与本地语义告警,让风险响应发生在现场
智慧工地系统能否真正落地,关键不只在算法精度,也在部署成本、响应速度和现场可用性。项目面向Orange Pi AI Pro构建低成本边缘推理链路,将训练后的模型按照PyTorch权重、ONNX中间表示、Ascend OM离线模型和NPU推理的流程部署到端侧设备。NPU负责目标检测模型推理,CPU负责视频采集、Web服务、规则推理、事件管理和语义告警调度,形成“边缘自治、低延迟响应、弱网可运行”的现场应用模式。

(图3 “智安量巡”B/S Web端实时检测与监管展示界面)
为了适应工地边缘设备算力有限、视频流不稳定和多任务并发的特点,系统采用Camera Worker、Inference Worker、LLM Worker与Streamlit主线程解耦的多线程机制,并通过动态跳帧、最新帧队列和低负荷视觉推理策略避免旧帧堆积。测试结果显示,系统在OM/NPU端侧运行可达到4.11 FPS,推理延迟约243.58 ms,单点部署成本约0.15万至0.3万元,具备轻量化推广潜力。
在告警表达方面,系统采用“规则引擎负责安全判定,本地大语言模型负责语义表达”的架构。视觉模型和规则引擎先确定目标类别、人员位置、风险区域、PPE状态、风险等级和建议动作,本地大模型再在事实约束下生成更接近施工现场语言的中文提醒。例如,系统不只是输出“NO-Hardhat”,而是转化为“机械作业区人员未佩戴安全帽,请立即远离设备并整改”。当大模型加载失败、输出超时或内容不合规时,系统会自动回退到规则模板,保证告警稳定可靠。
四、从告警到整改,形成可追溯的隐患治理闭环
传统监控系统的短板在于报警之后缺少管理链条:谁来处置、处置到哪一步、是否留下证据、是否完成复核,往往依赖人工记录。“智安量巡”将检测结果、风险事实和整改流程统一纳入事件管理。系统检测到风险后,会自动生成事件编号,并记录发生时间、隐患类型、风险等级、所属区域、目标坐标、人员告警明细、研判依据、建议动作、处理状态、责任人、整改说明和复核结果等信息。
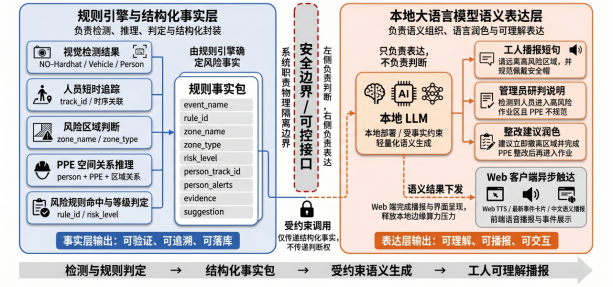
(图4 规则引擎、结构化事实包与本地语义告警协同机制)
事件生成后首先进入“未处理”状态,管理人员可根据现场流程将其流转为“已派发”“已整改”“待复核”“已关闭”或“误报”。整改过程中,系统支持保存事件生命周期和证据信息,形成“发现—记录—派发—整改—复核—关闭/误报”的治理闭环。与单纯红框报警相比,该机制更接近施工安全管理的真实流程,也更便于项目部进行责任追溯、隐患统计和经验复盘。
从技术链条看,闭环治理的核心并不只是增加一个管理页面,而是把小目标检测、区域语义、施工坐标、风险规则、中文告警和事件状态连接成统一体系。这样,系统既能服务一线工人的即时避险,也能服务安全员的派单整改,还能服务项目管理者的风险复盘和长期治理。
五、从竞赛实践走向工程推广,探索智慧工地安全监管新路径
“智安量巡”团队依托江西哲鼎科技有限公司,围绕“算法深度、边缘部署、坐标融合、语义告警和闭环治理”持续打磨系统能力。团队曾参加2025年中国机器人大会暨RoboCup机器人世界杯中国赛,并在先进视觉赛工业测量赛项中获得国家级三等奖。竞赛实践不仅检验了团队在视觉识别、工程实现和系统集成方面的能力,也为后续面向智慧工地场景的应用拓展积累了宝贵的技术落地与场景实践经验。
(图5 南昌大学哲鼎科技团队参加2025年中国机器人大会暨RoboCup机器人世界杯中国赛)
面向未来,“智安量巡”可继续拓展至房建、市政、园区、矿山、港口、仓储、电力巡检等多类安全监管场景。随着更多真实施工数据接入、规则库持续完善以及本地大模型能力提升,系统有望进一步识别更加复杂的高层次隐患,例如多人协同作业风险、机械盲区停留、材料堆放异常和危险区域长期占用等问题。
项目团队表示,智慧工地建设不应只停留在视频上云和数据看板,而应进一步走向风险可定位、告警可理解、处置可追踪、管理可闭环。“智安量巡”正是面向这一目标的探索:让AI不只是发现问题,更能帮助现场把问题定位清楚、表达清楚、整改清楚、归档清楚,为建筑施工安全生产和基层智能监管提供可复制、可推广的技术路径。(南昌大学:彭俊哲,苑鼎祥,李娟)
审核:王峰 郭江涛 石贵明
校对:小强